Conventions
Field Orientation
The pond library assumes the standard FIRST FTC field orientation:
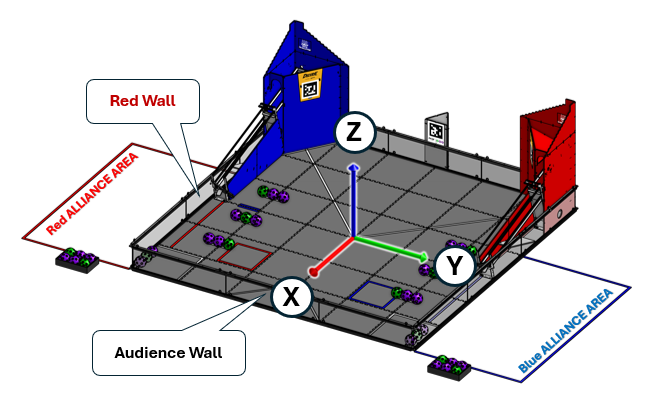
Please pay attention to field orientation as errors due to misorientation might be subtle and hard to diagnose.
Robot Orientation
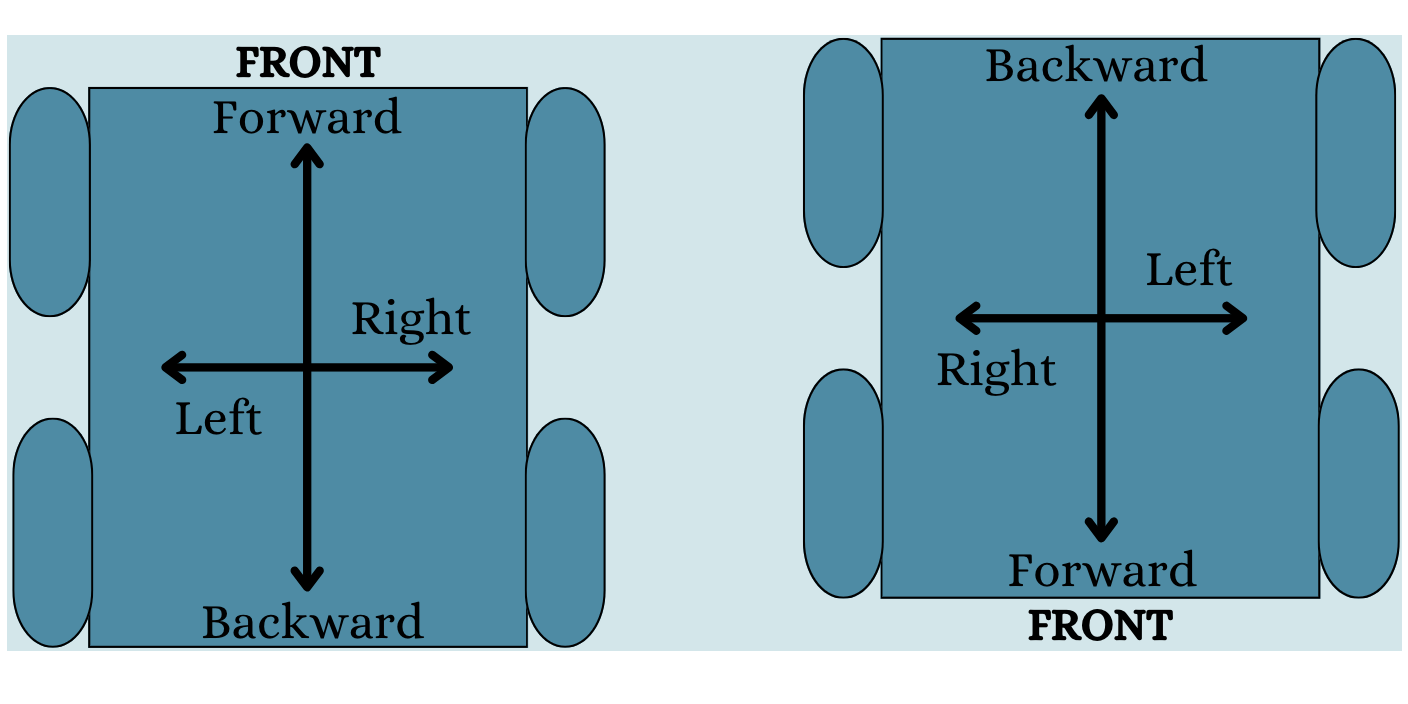
Robot-centered orientation is where the movement of the robot is based on the robot’s own perspective. For instance, if the joystick is pushed forward, the robot moves forward based on its front, regardless of its orientation. By contrast, in field-centered orientation, the robot moves forward to the top of the field, no matter how it’s oriented. The pond library uses robot-centered orientation. Because of this, be sure to account for that change when driving the robot.
Units
| Measurement | Unit | Comment |
|---|---|---|
| Distance | (Any) | Be consistent across code |
| Angle | Radians | Unless otherwise denoted |
| Time | Seconds | When possible, use the Duration class to correctly represent time with nanosecond precision |
Per above, if distance is used in Inches, Speed will be represented in Inches/Second.