Features Overview
Overview
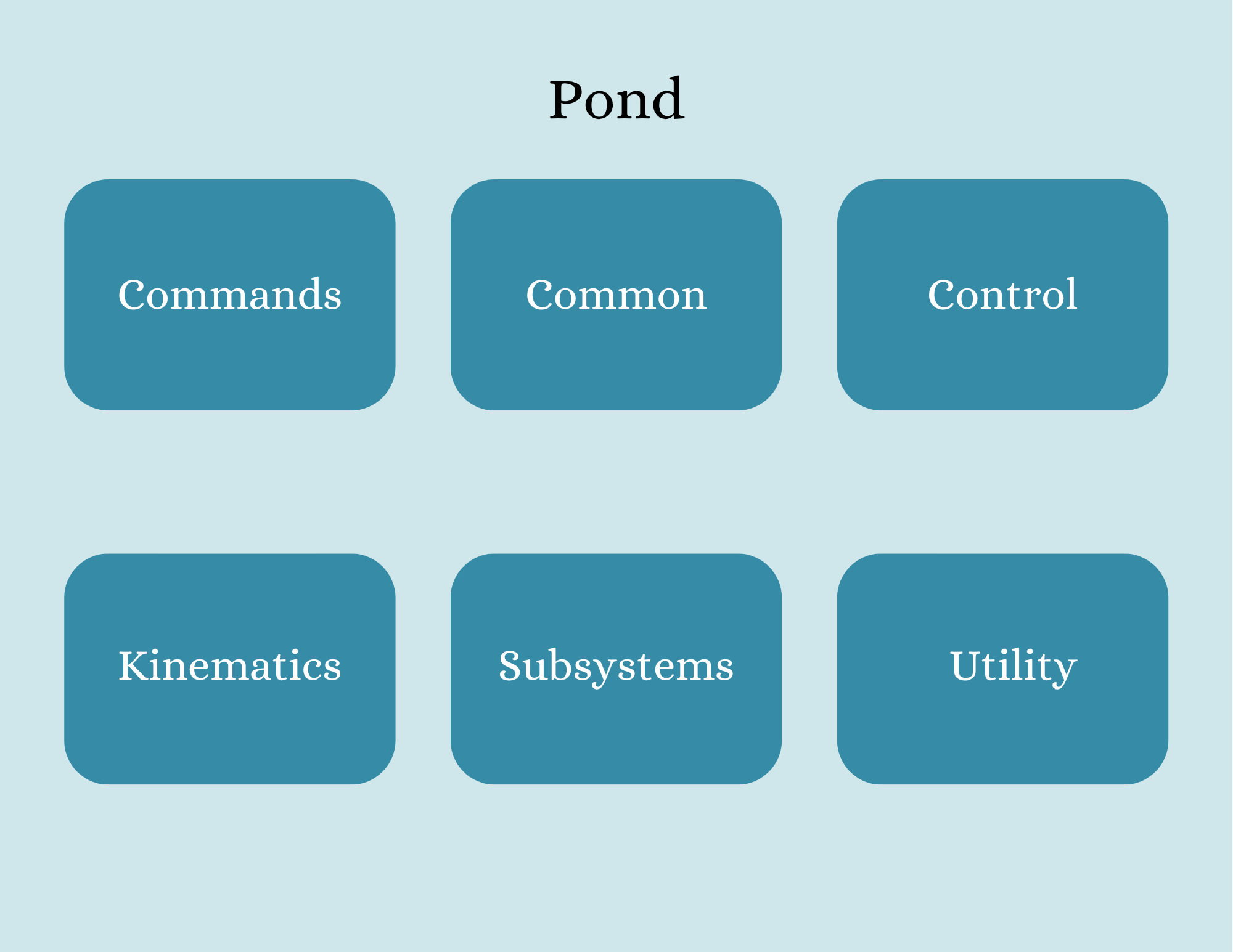
With Pond, you can build performant and reliable code for your FTC code through a modular and event-driven coding paradigm. The Pond library functionality is separated in the following packages:
| Package | Contents |
|---|---|
Common |
Common classes such as Pose2D, Duration, Stopwatch, etc. |
Commands |
Command execution systems and common commands |
Control |
Hardware control classes such as PID implementations |
Kinematics |
Robot movement classes as Mecanum Forward and Inverse kinematics calculators |
Subsystems |
Robot organization into subsystems and hubs |
Utility |
Utility classes for math, logging, strings, etc. |
Event-Driven Programming
FTC robots must be periodically evaluating their state - reading sensors, motor encoders, calculating odometry - but it is not trivial to program robot operations while ensuring that all components of the robot continue operating without delay. Event driven programming enables simple and efficient programming in a very simple an concise manner.
- Robot periodically process all its subsystems automatically
- Robot periodically monitors for the trigger conditions and runs the commands when required
The library also provides conditional helpers which makes it easy to check changes in state of buttons and sensors.
Competitiveness: This structure supports intelligent, competitive robot behavior—whether you’re following a trajectory or reacting to game elements.
Example:
// Chassis movement
Command chassisMovement =
commandFactory.dynamic(
"JoystickCommand",
d -> d
.when(CommandConditionBuilder::Always)
.execute(() -> drivetrain.setPower(new Pose2D(-gamepad1.left_stick_y, -gamepad1.left_stick_x, -gamepad1.right_stick_x)))
);
commandScheduler.runPeriodically(chassisMovement);
Subsystems
The use of subsystems promote modular, easy to maintain, robot code through the following:
- Each class has a clear job since the logic is organized by function.
- Subsystems make sure that a piece of hardware is only controlled by one command at a time.
- Having subsystems creates a modular approach that makes commands more reusable and testable.
Example:
// Initalizes the robot subsystems
@Override
protected void onInit() {
HardwareMapAccessor hardwareMapAccessor = new HardwareMapAccessor(hardwareMap, logger);
robotSubsystems.add(new DeadWheelsLocalizer(hardwareMapAccessor, logger));
robotSubsystems.add(new ArmController(hardwareMapAccessor, logger));
robotSubsystems.add(new MecanumDrive(hardwareMapAccessor, logger));
}
Continue reading through the next sections for a more complete view of the functionality!